← Back to projects

Firmware • Control
Self-Balancing Robot
CAD + 3D printed mechanical design combined with digital PID control in C++ for balance and disturbance rejection.
Highlights
- Arduino + MPU6050 (IMU), H-bridge motor drive, buck converter power stage.
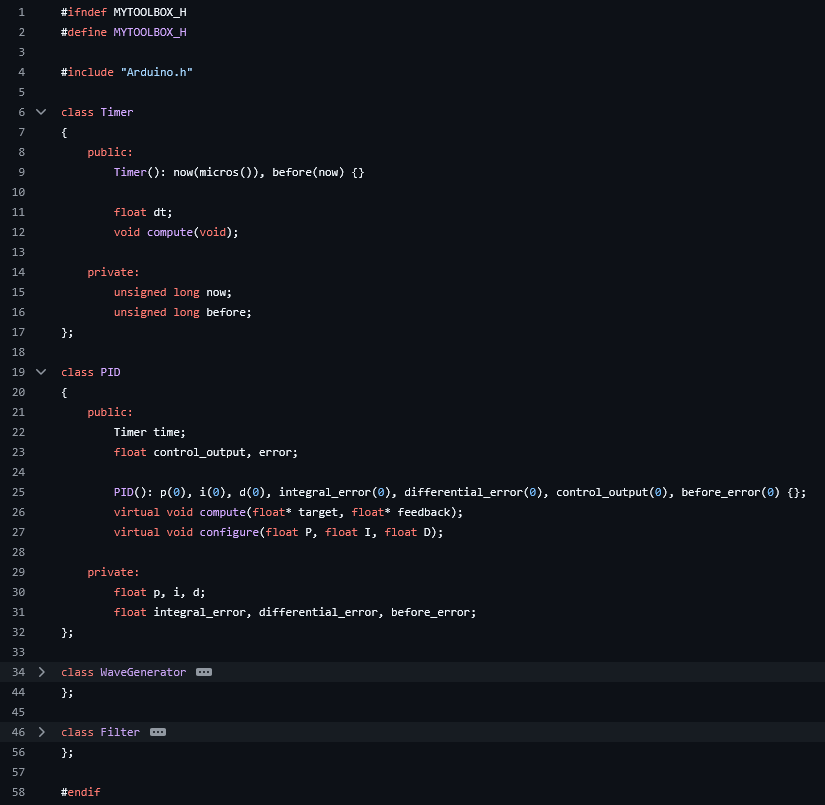
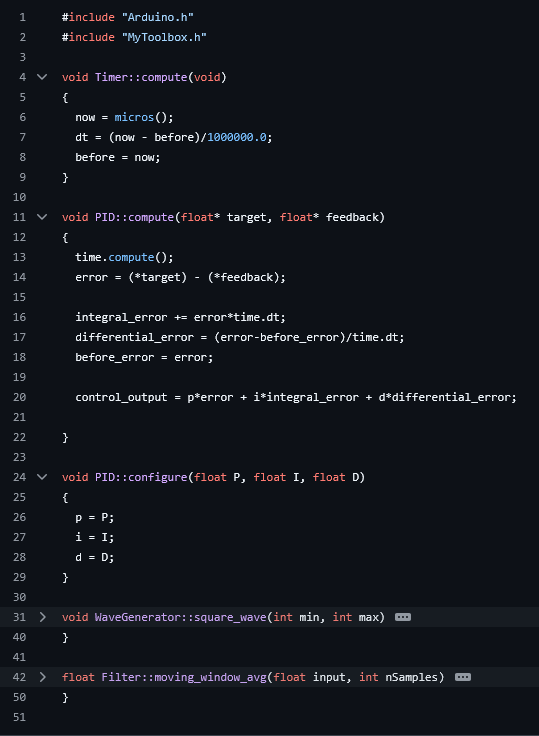
- Digital PID control loop implemented in C++ with iterative tuning.
- Key challenge: reliable orientation estimate (sensor fusion + noise handling).
Gallery
Click an image to open it full-size in a new tab.